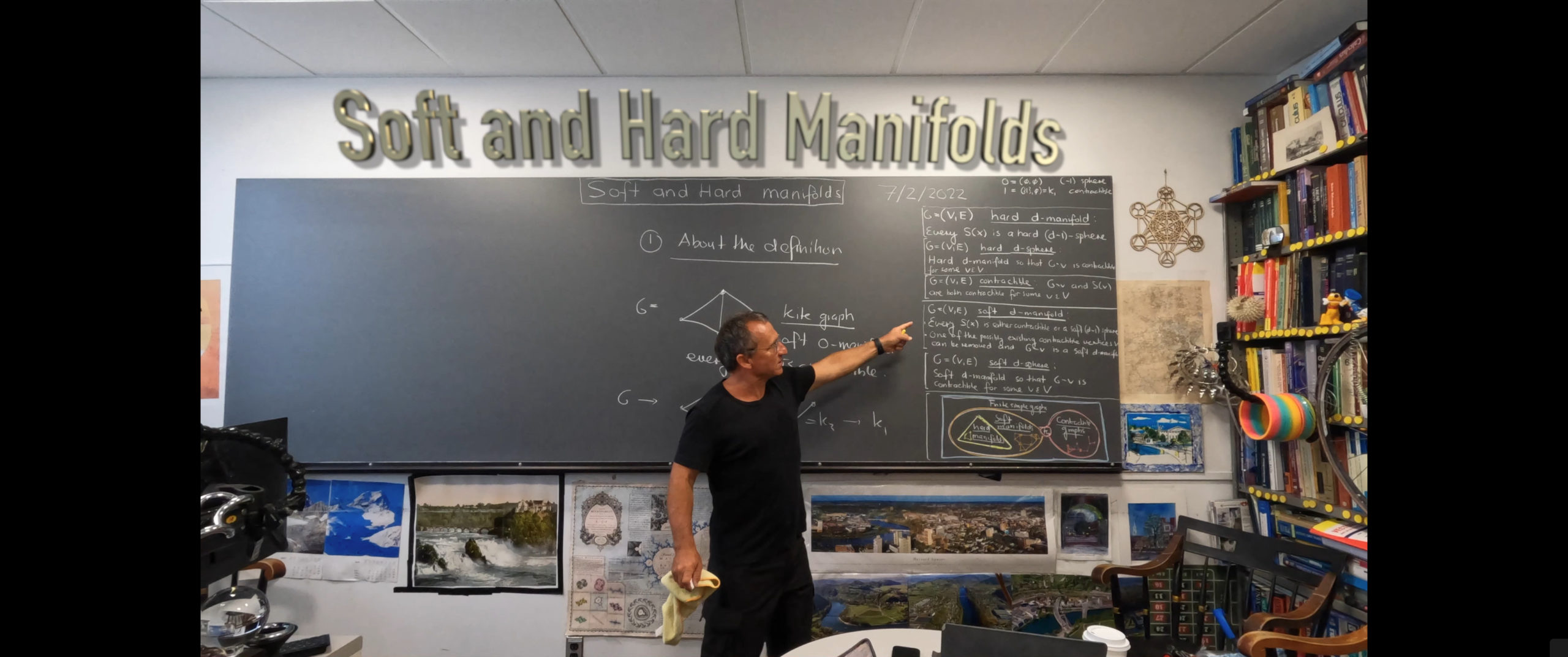
On July 2, an other summary about soft manifolds. It was primarily to fix the definitions. One of the things which I had to worry about is whether to require all vertices with contractible unit sphere to be removable or only one. In the definition of contractibility, the existence or all quantor matters. A graph G is contractible, if there exists a vertex x such that G-x and S(x) are contractible. With the all quantor one would only get very few contractible graphs like complete graphs. In the definition of sphere, the all or existence quantor does not matter. A d-sphere is a d-manifold such that there exists a vertex x, for which the graph G-x is contractible. We could also replace the exist by all because in a d-sphere, all vertices x have the property that G-x is contractible and S(x) is a (d-1)-sphere. In the definition of soft d-manifold, we now decided to ask only that there exists a vertex x with contractible S(x) such that G-x is a soft d-manifold. In the movie, I explain why the kite graph is a soft 0-manifold with this definition and why it would not be if we would ask for all unit spheres to have G-x to be a d-manifold. In this talk, I also started to call the usual discrete manifolds “hard manifolds”. It is maybe a bit shorter than discrete manifolds. And the later name has been used for many different notions of discrete geometric spaces, especially for triangulations, which is a very problematic definition. The official definition saddles the horse differently: you start with a topological space X and say a triangulation is an abstract simplicial complex K whose geometric realization is homoemorphic to M. For a compact smooth manifold M (which always admit a PL triangulation), a triangulation could be defined as a finite abstract simplicial complex such that its geometric realization is homeomorphic. One could now define a discrete d- manifold as a finite abstract simplicial complex whose geometric realization is homeomorphic to a d-manifold. In the language of graphs [which I prefer because it is more intuitive and where of course, the graph is always equipped with the Whitney complex (=flag complex = clique complex)], one can say a graph is a discrete d-manifold, if the geometric realization of its Whitney complex is homeomorphic to a d-manifold. Now one can debate whether one wants in the definition to have unit spheres to be standard (d-1) spheres or whether one can allow something like a Poincare sphere. Note that most of the time one refers here to the standard unit sphere in Euclidean space and so betrays categories because if one deals with combinatorial finite objects, one should not really need the infinity axiom and especially not need the Euclidean space. For topological manifolds the situation is much more difficult as there are 5 or larger dimensional manifolds which are not homeomorphic to a simplicial complex at all (Ciprian Manolescu who has proven this had been a graduate student at Harvard). By the way, as I had to learn the hard way the last dozen years or so, that graph theorists still mostly consider graphs one dimensional objects. In the context of topological graph theory allow two dimensional cliques. One has looked at Whitney triangulations of surfaces and called them clean triangulations. The difficulty with the notion triangulation has been demonstrated especially in the context of the Hauptvermutung which asked whether any two triangulations of a manifold have Barycentric subdivisions that are combinatorially equivalent. This turned out to be false. There are homeomorphisms of PL-manifolds which are not isotopic to PL homeomorphisms. The purist (and computer scientist) in me likes mathematics more if it does not involve infinity at all. Indeed, one can define manifolds perfectly well in a combinatorial setting and hardly lose anything in the context of differentiable compact manifolds. For every compact smooth manifold there exists a finite simple graph G=(V,E) such that the Whitney complex is homeormophic. And this finite simple graph can be a hard d-manifold. Of course, one can now ask whether it is possible to model more general manifolds. The answer is of course yes, one has just to change the notion of d-sphere. One can define finite simple graphs which are Poincare spheres for example and allow such Poincare spheres as unit spheres. One can also generalize the notion of sphere. For me, an attractive generalization is the notion of Dehn-Sommerville space which unlike spheres has a purely combinatorial definition. Dehn Sommerville spaces are defined as graphs for which the unit spheres are Dehn-Sommerville spaces. With this definition, one gets to more general spheres, which are not manifolds and which still satisfy Dehn-Sommerville relations. What is important is that all these definitions never, ever tap into infinity. These are notions which a finitist likes. And this is in the spirit of quantum calculus. If in some decades, somebody would find a fundamental inconsistency in a major axiom system like ZFC (never excluded by Goedel’s incompletness theorems as we can never within a system prove its inconsistency), we would have to retrench to a finite setup.
Hard d-manifolds
G=(V,E) is a hard d-manifold if every unit sphere S(x) is a hard (d-1)-sphere. G=(V,E) is a hard d-sphere if it is a hard d-manifold such that G-v is contractible for some v. A graph G=(V,E) is contractible, if G-x and S(x) are both contractible for some v. The empty graph 0 is the (-1)-sphere and the one-point graph 1 is contractible.
Soft d-manifolds
G=(V,E) is a soft d-manifold if every unit sphere S(x) is a soft (d-1)-sphere or contractible and if one of the possibly existing v with contractible S(v) has the property that G-v is a soft d-manifold. A soft d-sphere is a soft d-manifold so that G-v is contractible for some v. The empty graph 0 is a soft (-1) sphere and soft (-1) manifold.